Isaac Sim cartpole 예제
https://github.com/akswnd98/cartpole_train.git
GitHub - akswnd98/cartpole_train
Contribute to akswnd98/cartpole_train development by creating an account on GitHub.
github.com
강화학습의 대표 예제인 cartpole 학습을 isaac sim으로 하는 방법에 대해서 알아보자.
일단 clone으로 설치하고
python script를 어떻게 isaac sim으로 실행하는 걸까.
Isaac sim 경로

일단 윈도우 기준으로 isaac-sim.bat 파일은
C:\Users\사용자명\AppData\Local\ov\pkg\isaac-sim-4.2.0
위치에 존재한다.
아무래도 환경변수로 설정해서 이용하거나 하면 되지 않을까.
Issac-sim 환경 설정 docs 사이트
1. Overview & Getting Started — Omniverse Robotics documentation
step(self, actions: Union[np.ndarray, torch.Tensor]): triggers task pre_physics_step with actions, steps simulation and renderer, computes observations, rewards, dones, and returns state buffers
omniverse-content-production.s3-us-west-2.amazonaws.com
여기 보면 예제 환경을 isaac sim에서 실행하는 메뉴얼인 것 같다.
Installation using Isaac Sim pip — Isaac Lab documentation
isaac-sim.github.io
isaac lab pip 설정 관련 문서도 있다.
OmniIsaacGymEnvs
1. Overview & Getting Started — Omniverse Robotics documentation
step(self, actions: Union[np.ndarray, torch.Tensor]): triggers task pre_physics_step with actions, steps simulation and renderer, computes observations, rewards, dones, and returns state buffers
omniverse-content-production.s3-us-west-2.amazonaws.com
우선 위 사이트는 isaac-sim에서 Omni isaac gym env의 강화학습 예제를 실행하는 방법을 알려준다.
이 docs대로 isaac-sim을 실행해보자.
일단 여기서 실행할 예제 환경은
https://github.com/isaac-sim/OmniIsaacGymEnvs
GitHub - isaac-sim/OmniIsaacGymEnvs: Reinforcement Learning Environments for Omniverse Isaac Gym
Reinforcement Learning Environments for Omniverse Isaac Gym - isaac-sim/OmniIsaacGymEnvs
github.com
이 github 예제를 실행할 것이다.
conda create --name isaac-sim python=3.8아나콘다 환경을 만들고.
환경을 activate한다.
git clone https://github.com/NVIDIA-Omniverse/OmniIsaacGymEnvs.gitgithub 소스 코드를 clone 받고
For Windows: doskey PYTHON_PATH=C:\Users\user\AppData\Local\ov\pkg\isaac_sim-*\python.bat $*윈도우의 경우 임시적으로 batch 파일 경로를 alias로 설정한다.
PYTHON_PATH -m pip install -e .해당 파이썬으로 install을 해본다.
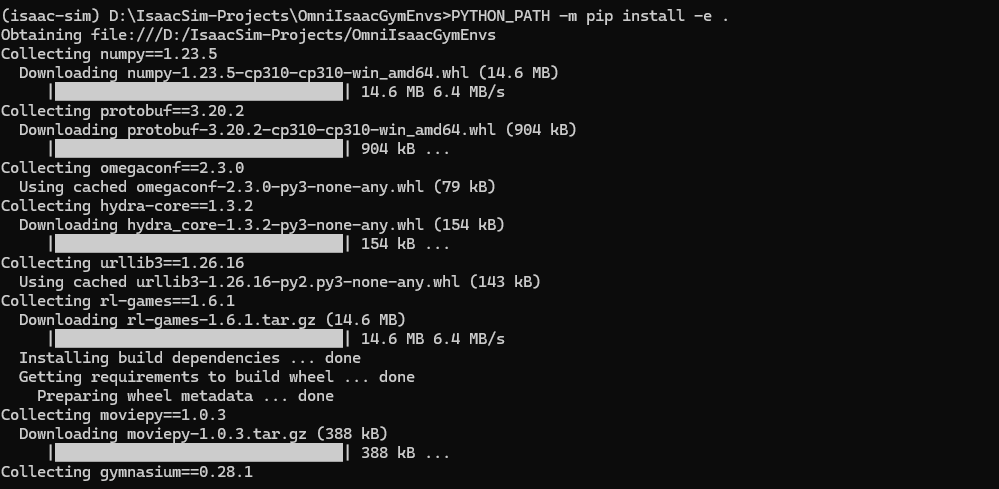
설치가 쭉 된다.
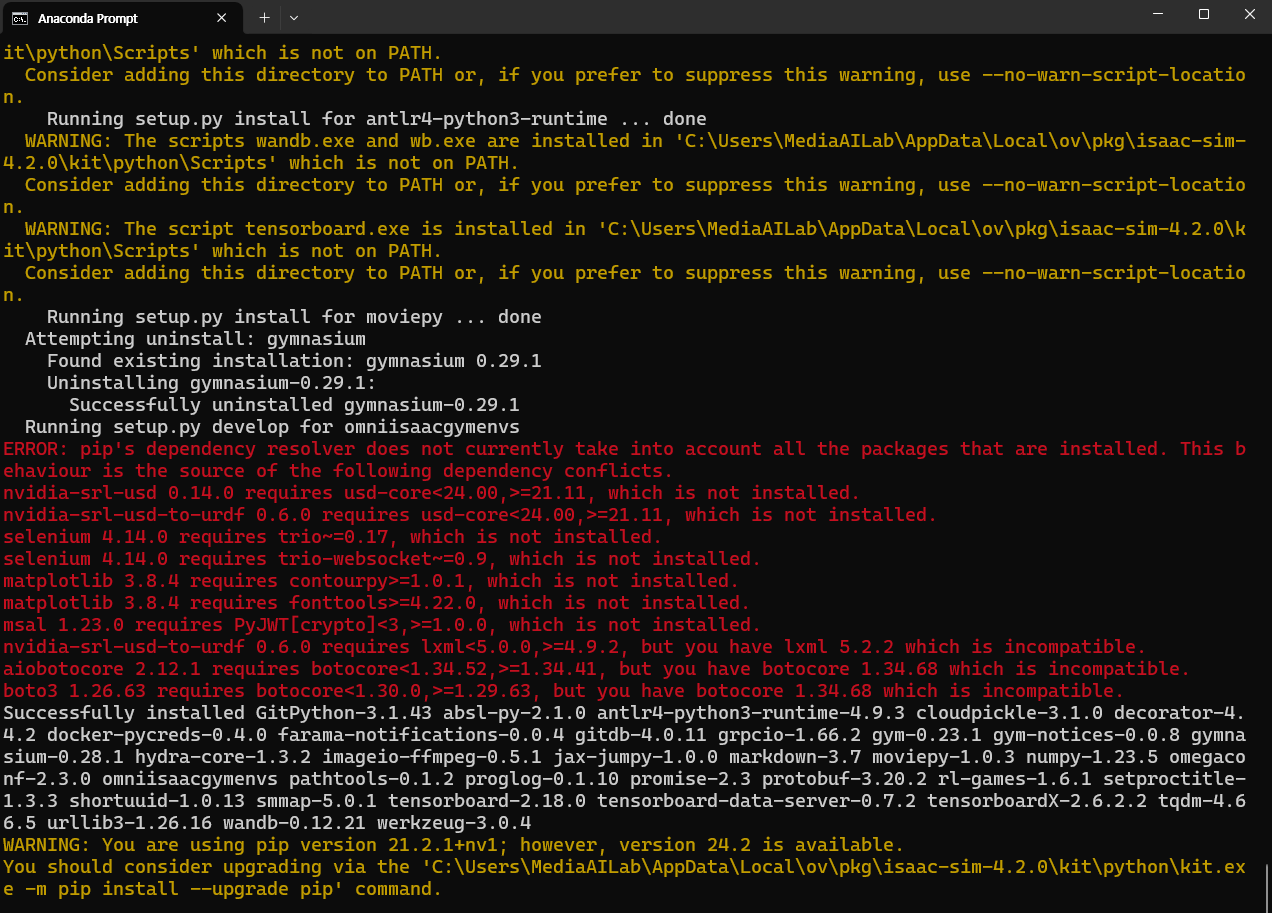
어우씨 에러가 뜨는데?

하지만 이 에러는 예상된 에러이고 무시해도 되는 에러라고 한다.
휴...
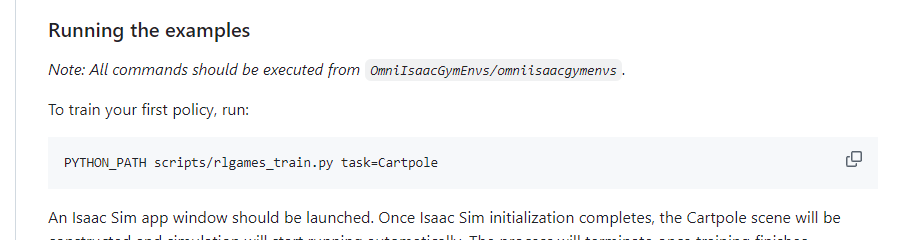
PYTHON_PATH scripts/rlgames_train.py task=Cartpole그 다음 python파일을 실행해보자.

하지만 에러.. 디렉토리 오류라고?
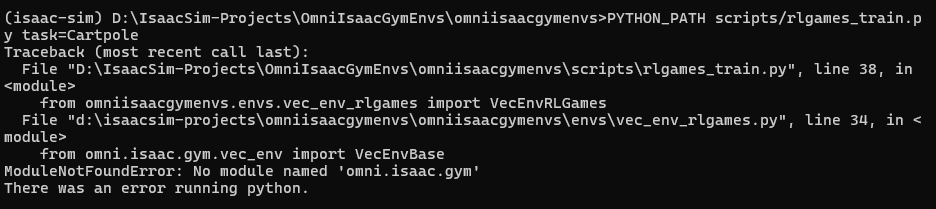
올바른 경로의 스크립트로 접근을 해도 오류가 난다.
isaac-gym 모듈이 없다는데.
어떻게 이걸 해결하지?
omni.isaac.gym 오류 원인 추정
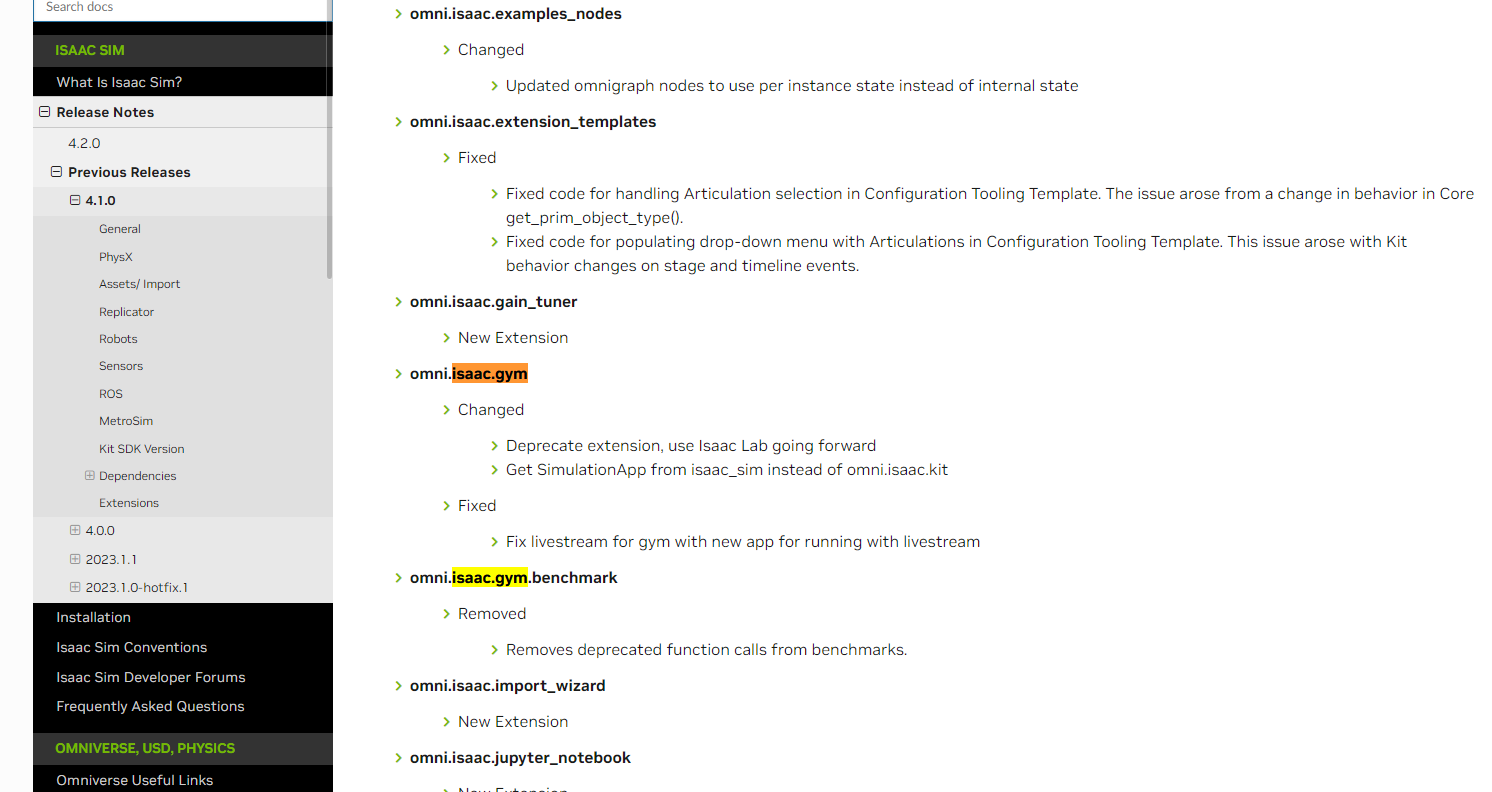
아무래도.. omni.isaac.gym이
release note에서 볼 때 deprecated 되어서 안되는게 아닐까 싶다.
https://docs.omniverse.nvidia.com/isaacsim/latest/archived_release_notes.html#id2
4.1.0 — Omniverse IsaacSim latest documentation
Add examples to docstrings, fix type annotations, and improve description. Affected modules: omni.isaac.core.objects (capsule, cone, cuboid, cylinder, sphere, ground_plane) Add examples to docstrings, fix type annotations, and improve description. Affected
docs.omniverse.nvidia.com
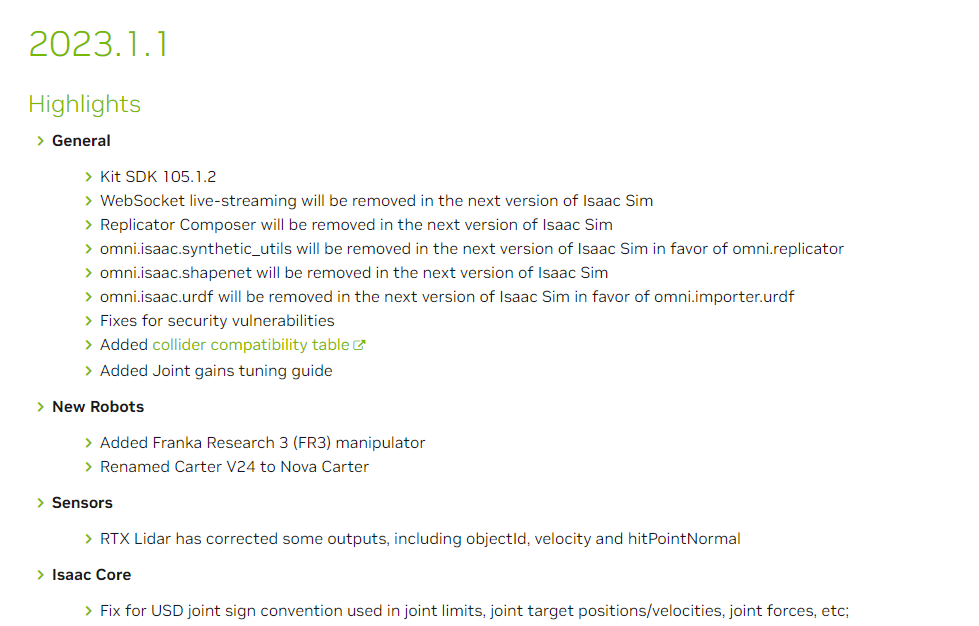
확인해보았을 때
omni.isaac.gym은 isaac sim의 extension인데,
4.0.0에서는 deprecated되었고, 2023.1.1에는 살아있는 것같다.
즉 isaac sim 4.0.0 버전부터는 gym을 못쓰는 것.
그렇다고 isaac sim 버전을 바꿀 수는 없는 터...
isaac-lab으로 시도하는 방법을 찾아야한다.
1. Overview & Getting Started — Omniverse Robotics documentation
step(self, actions: Union[np.ndarray, torch.Tensor]): triggers task pre_physics_step with actions, steps simulation and renderer, computes observations, rewards, dones, and returns state buffers
omniverse-content-production.s3-us-west-2.amazonaws.com
보니까 이게 2022년도 문서라 안되는 것 같다.
다른 방법으로 해야겠다.
'개발 · 컴퓨터공학' 카테고리의 다른 글
| Qt6 exe 빌드하기 (dll 포함시켜 빌드) (5) | 2024.11.17 |
|---|---|
| ASE 논문 코드를 실행해볼까 (11) | 2024.11.13 |
| Qt6 Opengl GLU 라이브러리 (6) | 2024.11.05 |
| Qt 6 Opengl 그림판 만들기 (6) | 2024.11.04 |
| Qt 5 버전 오픈소스 실행하기 (7) | 2024.11.03 |




